|
OnlineBodySchemaAdaptation
2.0
|
|
OnlineBodySchemaAdaptation
2.0
|
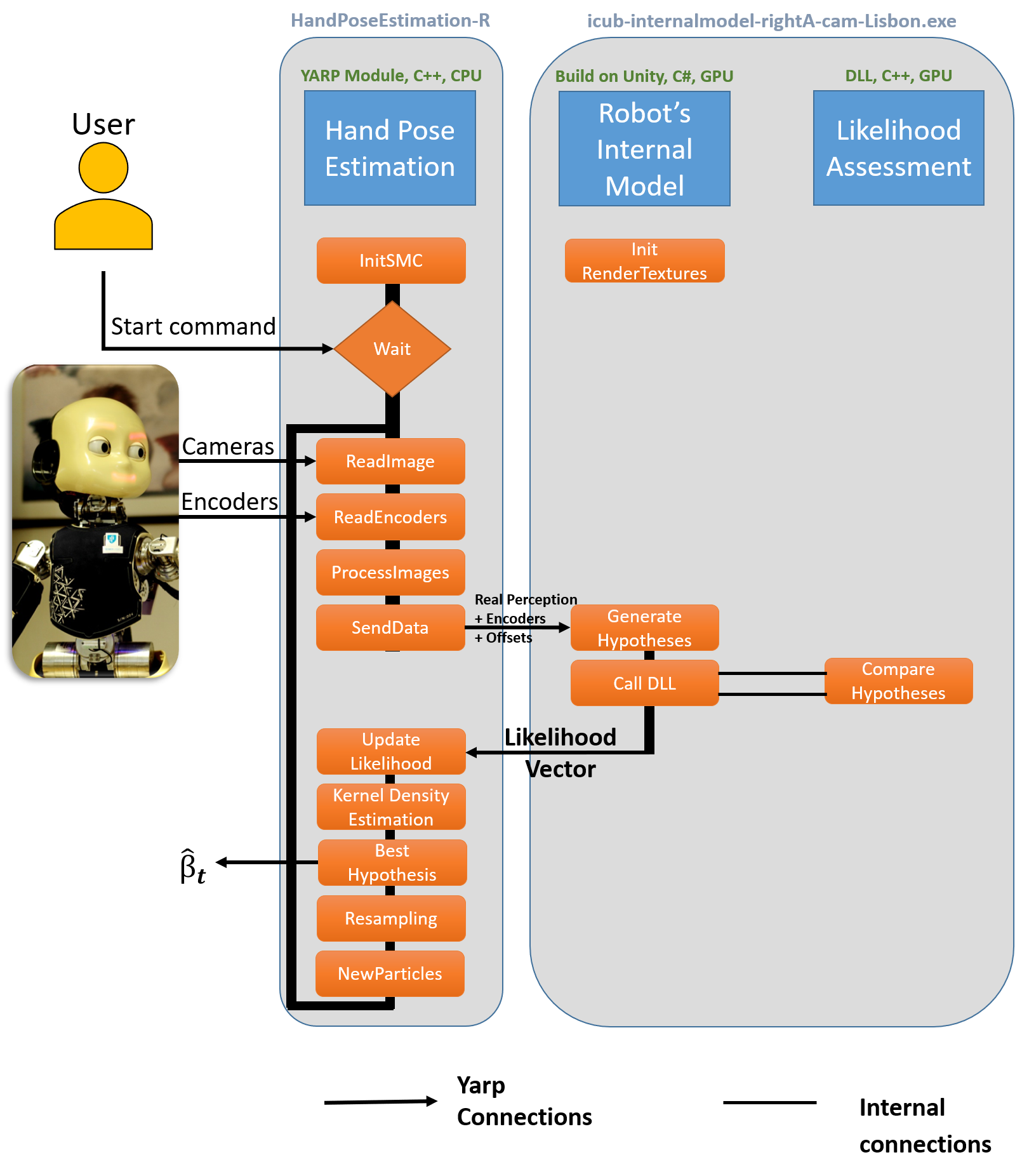
We propose a markerless hand pose estimation software for the iCub humanoid robot. The agent can calibrate its eye-hand kinematic chain without any markers which, from a developmental psychology perspective, can be seen as a body schema adaptation.
The code is divided into three logical components modules:
i) the hand pose estimation (see handPoseEstimation-module); ii) the Robot’s Internal Model generator (see internalModel); iii) the likelihood assessment (see likelihoodAssessment);
which are implemented, respectively, at the following repository locations:
The software architecture implementing the proposed eye-hand calibration solution can be seen in the following picture:
Please refer to the documentation:
Please refer to the documentation:
If you use this code please cite the following reference:
ARTICLE{ 10.3389/frobt.2016.00007,
AUTHOR={Vicente, Pedro and Jamone, Lorenzo and Bernardino, Alexandre},
TITLE={Online body schema adaptation based on internal mental simulation and multisensory feedback},
JOURNAL={Frontiers in Robotics and AI},
VOLUME={3},
YEAR={2016},
NUMBER={7},
DOI={10.3389/frobt.2016.00007},
ISSN={2296-9144}
}
The full open-access article can be found here
 1.8.11
1.8.11

