|
OnlineBodySchemaAdaptation
2.0
|
How to run the modules guide
Open a terminal and execute the internal model:
The internal model should start showing a high FPS value (depending on your machine)
Open a yarpdataplayer
and choose the root folder of the dataset.
Open a yarpmanager
and open the XML file:
NOTE: If you do not have ICUBContrib or a make install, the handPoseEstimation will not be found by yarpmanager, you can run it on a terminal on the respective build/bin folder.
You should have a yarpmanager similar to this:
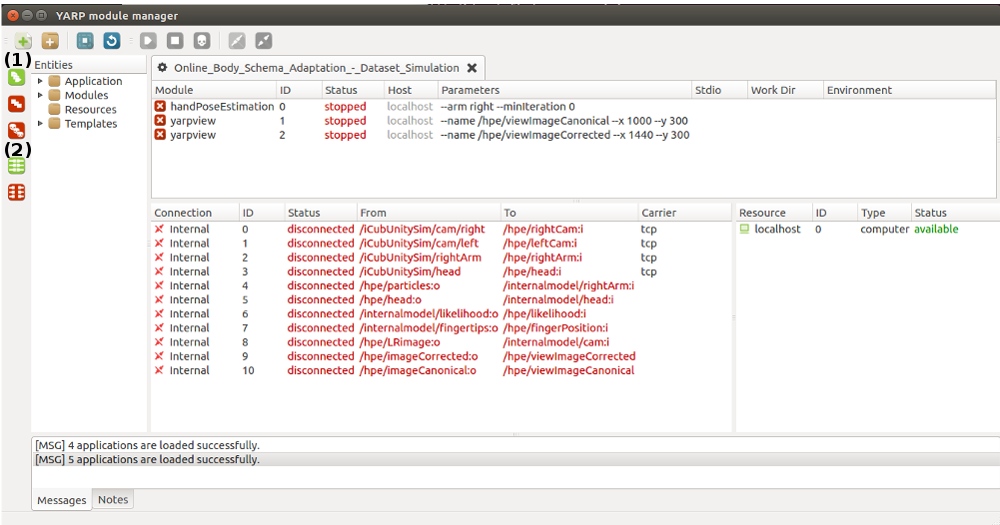
Push the run button (1) . (and the three modules should appear green)
Connected the ports (2) .
Open a terminal and type:
Then, you can type
to see the options available, but the most important command is:
and the superimposed fingertips will appear on the two yarpviews.
Edit the template:
in particular the connection between the both left and right cameras and the head and arm encoders. Open the XML with yarpmanager
After running the modules and connecting the ports, follow the same procedure has the testing with the Dataset section.
 1.8.11
1.8.11

