|
OnlineBodySchemaAdaptation
2.0
|
Step-by-Step Installation Guide
Check its dependencies before installing this module:
Optional
Then:
Open a terminal.
Go to the handPoseEstimation module root folder:
Press c (twice) and, if no error occurs, press g do generate.
Compile the code:
and if you have the ICUBcontrib repository installed do a
Check its dependencies before installing this module:
Then:
Open the cmake-gui executable
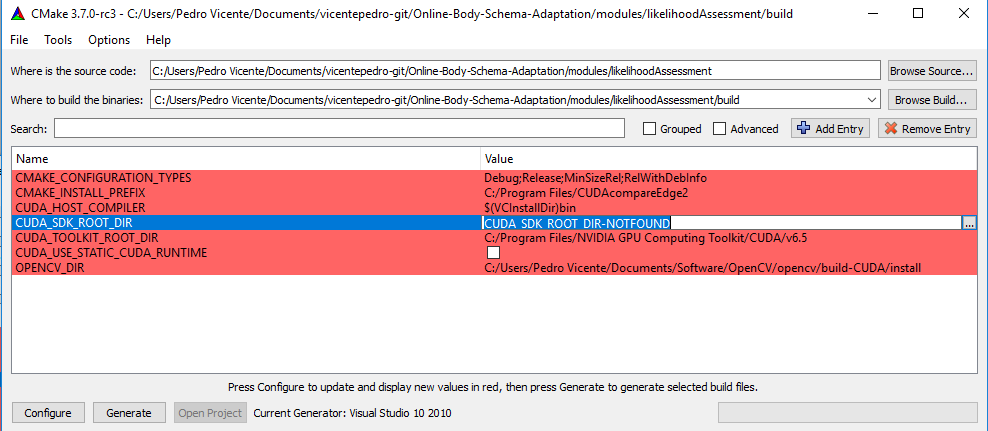
In the section where is the source code , insert the path (absolute path):
In the section where to build the binaries , insert the path (absolute path):
and press the configure button, choosing the 32 bit version of your compiler
The variable CUDA_SDK_ROOT_DIR will appear and should point to
or similar, according to the CUDA version installed.
Press generate and open the CUDAcompareEdge2.sln file (which is inside the build folder)
choose Release version, set CudacompareEdge2 as the Startup project, and build the project.
You should have now a CudacompareEdge2.dll file inside the Release folder.
Compile the Yarp Bindings for C#:
http://www.yarp.it/yarp_swig.html#yarp_swig_windows
You should have a yarp.dll file after installing the bindings.
Copy the CudacompareEdge2.dll file (generated during the compilation of the likelihood Assessment) and the yarp.dll to:
 1.8.11
1.8.11

